公道での自動運転車両の評価・検証OxTS:Autonomous vehicle sensor validation

公道での走行試験



特徴

Want RTK accuracy without having to pay for expensive post-processing software?
GNSSシグナルの受信が困難な環境でもできるだけ正確なデータが必要な場合、FOG IMUを買う予算やシステムを設置する十分なスペースがないことがあります。そのような場合にはOxTS社のgx/ix処理技術が役に立ちます。この技術は独自のRTK処理エンジンであり、GNSSとIMUが密接な連携状態で統合されています。NAVsolveソフトウェア(後処理)で基地局補正を追加するとセンチメートル・レベルのRTK精度を実現でき、GNSSシグナルの受信が途絶するエリアでもRTシステムを使うことで精度を大きく改善できます。

Maximum accuracy
RTK補正のリアルタイムの伝送はいつも容易であるわけでも可能であるわけでもありません。移動基地局へアクセス・無線接続できない、加入サービスへ接続するためのモデムがない、移動距離のベースラインが長すぎる等、これらがリアルタイムでの補正適用を妨害する要因です。今回gx/ix処理の導入で、基地局の補正を記録してある場合、補正情報をCORSネットワークからダウンロードできる場合は、後処理で補正を追加でき、誤差が数センチメートル単位という最高の精度を達成できます。

Maximum reliability
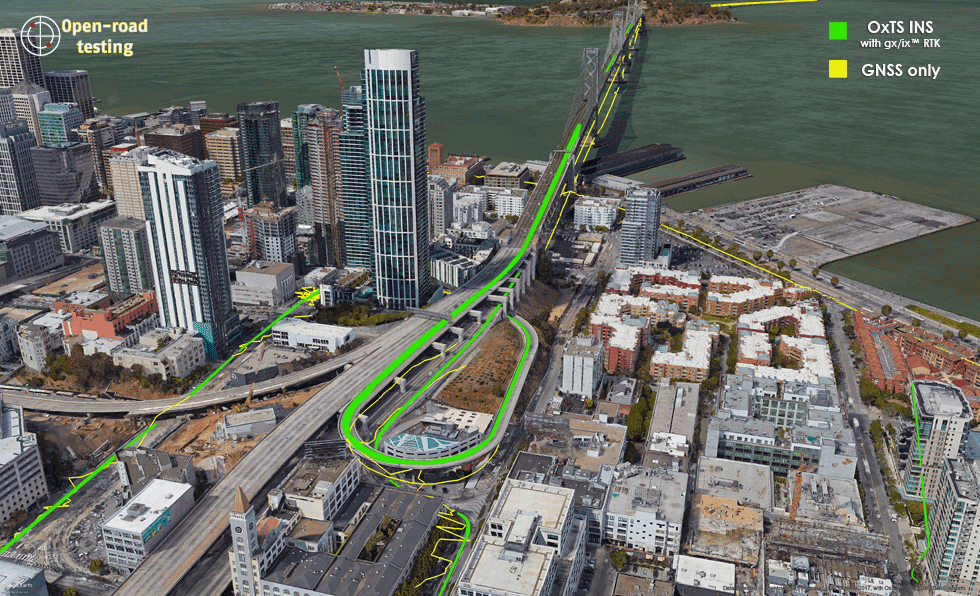
ビルの谷間、橋梁の下、樹木が生い茂っているような環境は、マルチパス、衛星可視性の低下、完全な通信停止などが起こり、GNSSベースのシステムには悪夢のような状態です。そのような環境でもgx/ixを利用したGNSSとIMUの密結合システムであれば、視界に衛星が3台以下の場合でも利用できる衛星からの生のGNSSデータがナビゲーション・ソリューションに統合されるので、位置情報の更新が行われ、位置のずれを大幅に減らすことができます。短い障害の後のRTKの再ロックも慣性再ロックで改善されます。
Inertial navigation in autonomous
vehicle development
測位情報をGNSSだけに頼っていると不完全なデータセットが作成されてしまいます。
OxTS社の世界的に有名な慣性ナビゲーション・システム (INS) は慣性センサからのデータを処理しますが、GNSSの位置更新と密結合されているので、あらゆる条件でも安定した ground truth データを提供できます。
公道環境ではGNSSの受信状態が悪い所もあり、その場合、衛星からの信号はブロックされてしまいます。 RTシステムは、ビルの谷間、橋梁の下、層をなす高速道路のように信号が遮断されたり途絶したりする場所においても安定した測位情報を提供します。
複雑なアルゴリズムを採用したことで衛星の数が例え4基見えていない場合においても位置更新を提供できるようになりました。
More than just positioning
INSは自律走行車に搭載した他のさまざまなセンサの中心的なコンポーネントです。車両は距離を測定するオドメーターと物体を検出するレーザ・スキャナ、画像を認識するデジタル写真カメラを利用できます。弊社のINSは画像処理センサをGNSSタイムスタンプと同期させ、オドメーターを使用する事でGNSSの受信条件が劣化した場合のドリフト量を抑えます。
自律走行車は画像処理センサの精度に左右される傾向があります。RTシステムは位置データはもちろん、ロール、ピッチ、方位、速度といったデータも出力します。これらの測定データは画像処理センサの姿勢や、GNSS更新の合間にどのように動いているか判断するときに重要です。
詳細情報
- ・後処理でRTK補正を追加
- ・環境に応じて処理を効率的に切り替え
- ・制限されたGNSS環境で単一衛星の支援
- ・慣性再ロックがRTK再取得をスピードアップ
- ・蜜結合によりマルチパス誤差の現象